马斯克又来搞事情 OpenAI要用VR训练机器人
扫一扫
分享文章到微信

扫一扫
关注99科技网微信公众号
智器材(公众号:zhidxcom)
文 | Lina
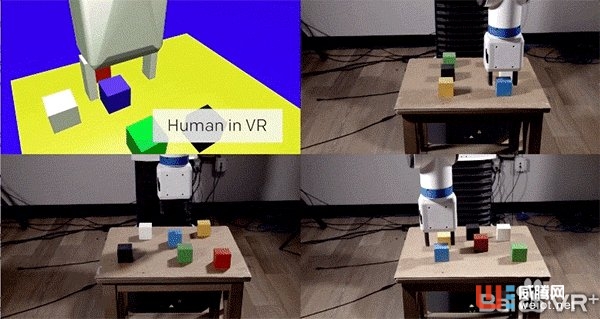
智器材5月17日新闻,本日,OpenAI宣布了一种新型算法:“一次性模拟进修(one-shot imitation learning)”,当人类在VR中演示一次某个动作后,机器通过进修这一动作就可以实行出雷同的结果。
OpenAI是Elon Musk于2015年12月宣布成立的非红利AI项目,科研人员会将大部分研究成果开源共享;次要关注增强进修和无监督进修——谷歌此前名声大噪的围棋顺序AlphaGo用的就是增强进修;而无监督进修必要机器处理大量不标记的数据,自己找到区分没有同数据子集、集群、或者相似图像的举措,有点像婴儿进修世界的方式,一向被视作人工智能的真正潜力释放点。
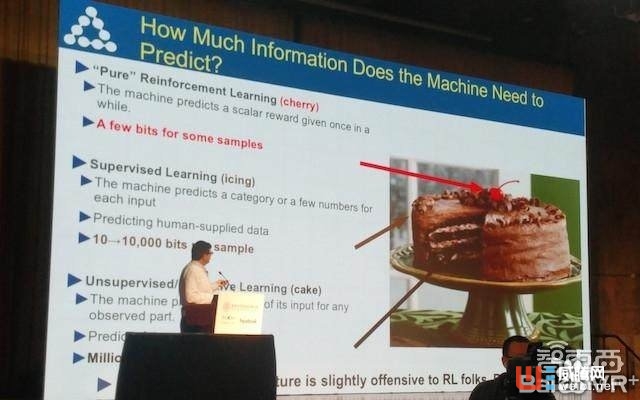
卷积神经收集之父Yann LeCun有一个经典比喻:若是人工智能是一块蛋糕,增强进修(Reinforcement Learning)就是蛋糕上的一粒樱桃,而监督进修(Supervised Learning)是蛋糕外的一层糖霜,但无监督进修(Unsupervised Learning)才是蛋糕本身。今朝我们只知道若何制作糖霜和樱桃,却没有知道若何做蛋糕。
一次性模拟进修
OpenAI宣布的这种新型算法“一次性模拟进修(one-shot imitation learning)”指的是,当人类在VR中演示一次某个动作后,比如将桌面蓝色的小盒子叠放在白色小盒子上这个动作,机器通过进修这一动作就可以实行出雷同的结果,并且没有论桌面盒子摆放的程序若何,机器都可以准确实行。
这套进修体系由两个神经收集组成:一个视觉收集(vision network)和一个模仿收集(imitation network)。
视觉收集(vision network)获得的图像来自机器人的摄像机,此前,这个视觉收集经过数十万弛模拟图像的练习,每弛都具有没有同纹理、光影效果等(可是从未使用真实图像举行练习);
模拟收集(imitation network)则必须生成一个与VR演示动作一致的实行步骤,并且推断出该义务的意图,使得在初始设定变更时(如盒子的摆放程序调乱时)依旧可以找到蓝色的盒子并把它叠在红盒子上。
今朝,学术界与产业界都在探求使用各种练习机器人的伎俩,比如英伟达CEO黄仁勋在上周的GTC大会上也宣布了一款名为ISAAC的增强进修世界模拟器,创造出一个完全虚拟的、博为练习机器人而挨造的世界。

这是一个遵循物理法则但没有遵循时间法则的世界,在现实生存中,你想要练习一台机器学会挨冰球,你要将这个冰球放在机器前面,一遍一遍地教会它;而在虚拟世界里,机器可以在一秒内重复众多次这样的动作,而且你还可以同时练习一堆机器进修挨球,然后找到内里最聪慧的一个,将它的“大脑”顺序复制出来,创建一堆同样的机器再继续练习筛选。(多人VR交互、30亿刀的显卡、秘密ISAAC白科技……干货满满的GTC 2017一文看尽)
投稿邮箱:jiujiukejiwang@163.com 详情访问99科技网:http://www.fun99.cn